#7 Basic Self-balancing towards Torque (part 3 - Old contact library)
- Aurel

- Feb 28, 2022
- 2 min read
Updated: Apr 6, 2022
After some research online I have found this library, which was created by someone and made available on the Mathworks website, however it is not official because it is not created by matlab/mathworks themselves:
The library for the contact forces was used in the following example: https://uk.mathworks.com/videos/modeling-contact-forces-in-a-cam-follower-94291.html
I have tried to understand how it worked, but in the example they used directly matlab variables and for my own project I must only use Simscape Multibody, so the only way to fully understand it I had to make some trial and error directly in the system.
While I was applying the contact force library into my own system I have foun a way to given the robot more freedom of movement as well as rotation, so I have replaced the Prismatic Joint with a 6DOF Joint. Something new which I had to add was a plane, that once the simulation started was giving me already some errors because the library needed to be connected in a specific way.

The fix for that is I had to add some weld joints for the plane and shaft and errors were gone, so the system now looks like this (together with the contact forces library block):

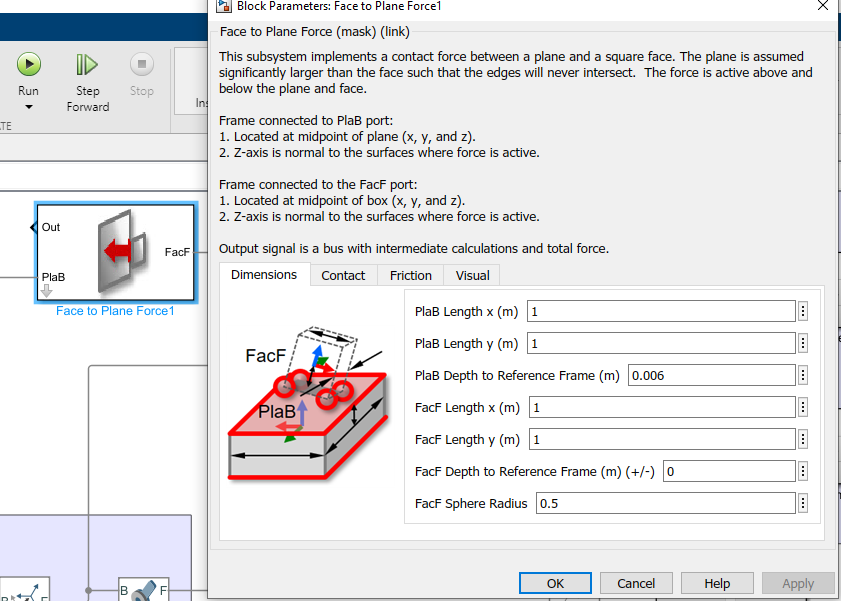
Specifically the block of the library, supposedly adequate for my system:
Once the simulation is started however, I had trouble finalizing it, and the robot was flying away (so it was probably not finalizing because it was trying to compute everything) - Video with 1/256x speed, meaning that if it was a real-time speed then the robot would have reached the top part in 0.02 seconds (extremely unrealistic simulation!!):
After many trial & errors with various values and different connections to the contact forces library block (going back to more default-looking values as all simulations were extremely unrealistic) I have sent sent an email to mathworks asking for guidance on how to use that library and if they had some examples exclusively with Simscape Multibody.
Meanwhile I try to work with what I have and do some more trial & error.



Comments